基于动态关系建模的社交机器人检测

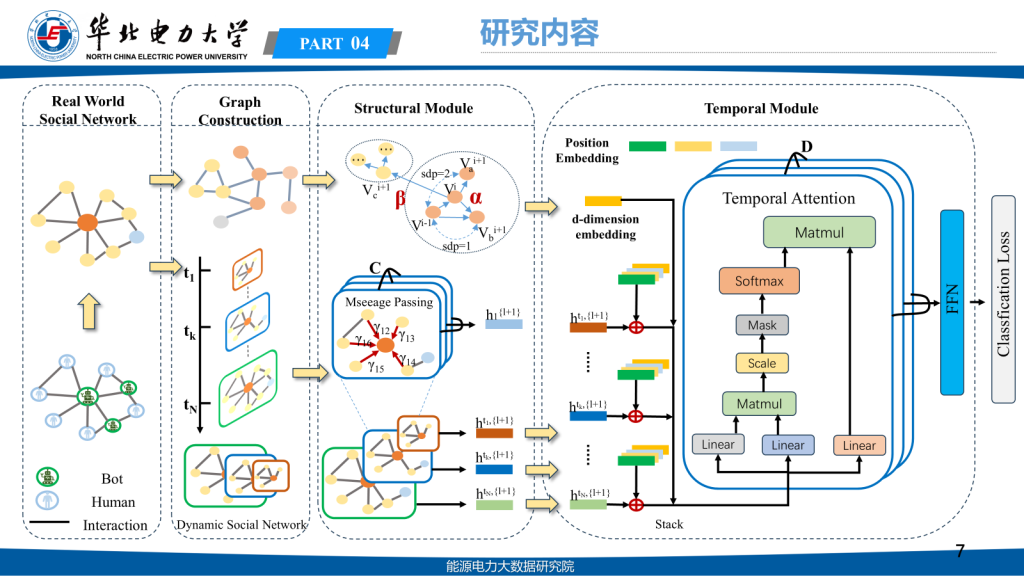
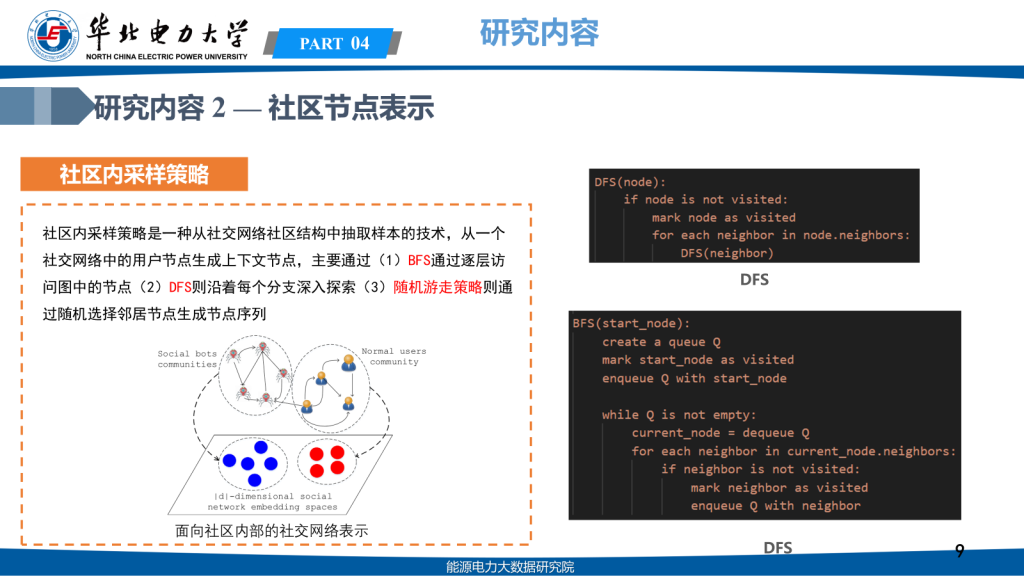
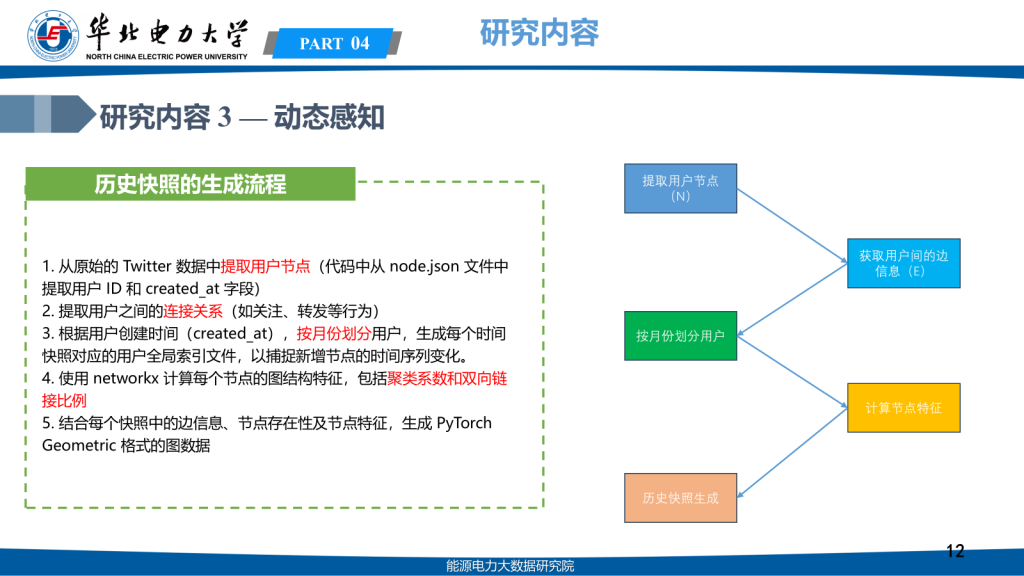
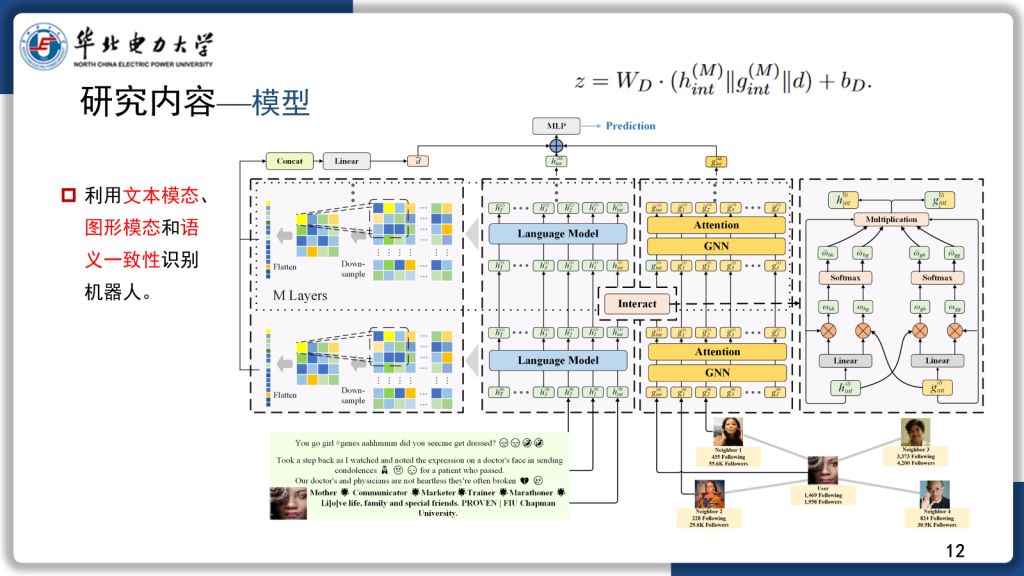
科研目的:提出一个基于动态关系建模的社交机器人检测模型。运用面向社区内部的节点表示方法,能够通过社区内采样策略,显著保留社交网络节点中的社区结构。并且将社交网络描述为动态图,通过构建一个结构模块从每个历史快照中提取社交网络的拓扑信息,对社交机器人和正常用户的不断演变的行为模式进行建模。有效捕捉随时间变化的动态特性及其节点之间的关系,提高社交机器人检测的准确性。

基于动态关系建模的社交机器人检测
科研目的:提出一个基于动态关系建模的社交机器人检测模型。运用面向社区内部的节点表示方法,能够通过社区内采样策略,显著保留社交网络节点中的社区结构。并且将社交网络描述为动态图,通过构建一个结构模块从每个历史快照中提取社交网络的拓扑信息,对社交机器人和正常用户的不断演变的行为模式进行建模。有效捕捉随时间变化的动态特性及其节点之间的关系,提高社交机器人检测的准确性。
此次组会汇报的内容为《关于推特机器人检测的相关研究》。
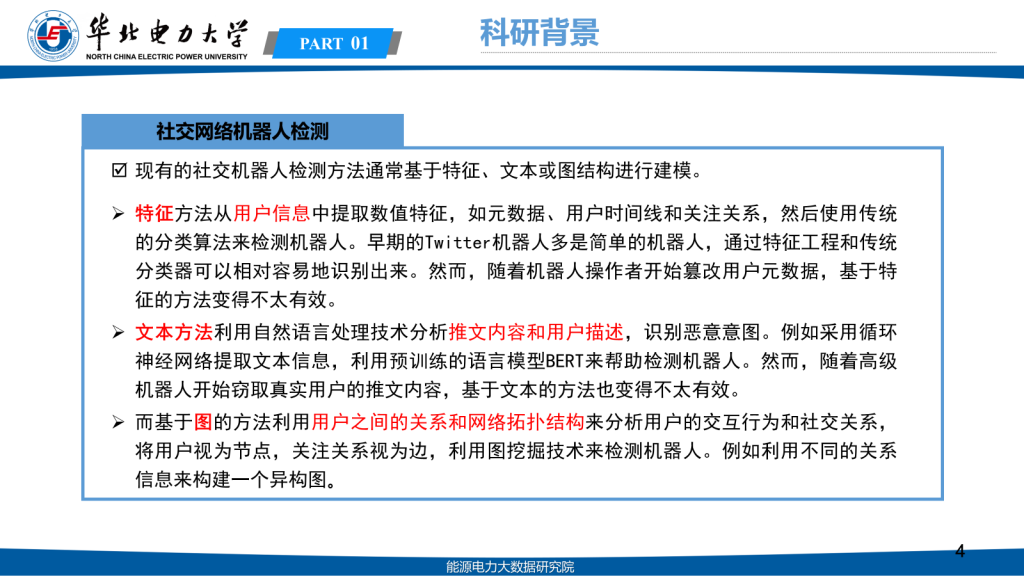
科研背景:Twitter bots,也称为自动程序控制的Twitter账号,它通过算法生成内容并建立交互,已经成为社交媒体用户广为人知的现象。如今它恶意应用的记录越来越多,这些推特机器人效仿人类行为,通过传播错误信息、加深社会分歧、宣扬阴谋论、影响重大选举等方式对网络社区构成威胁和挑战。
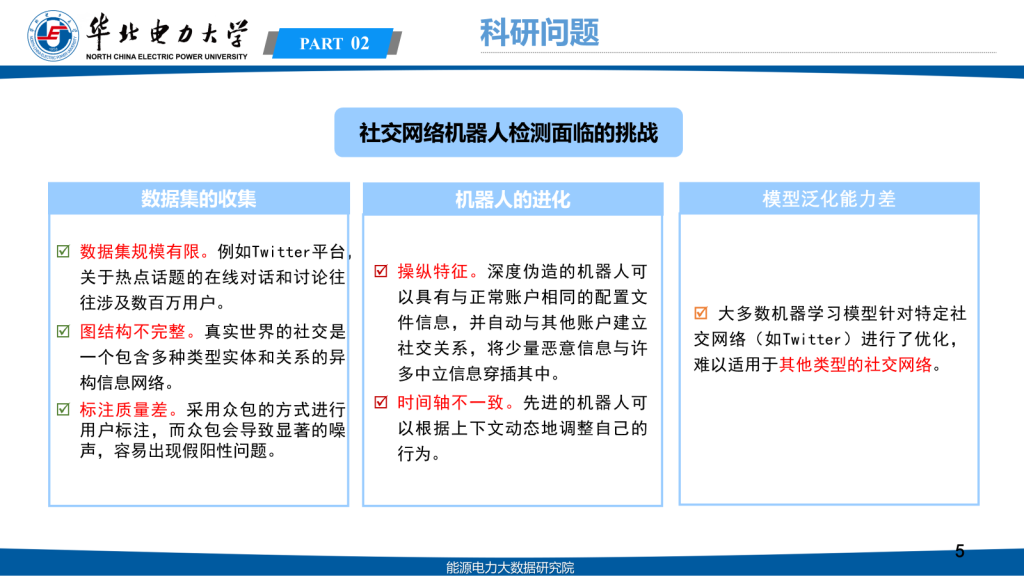
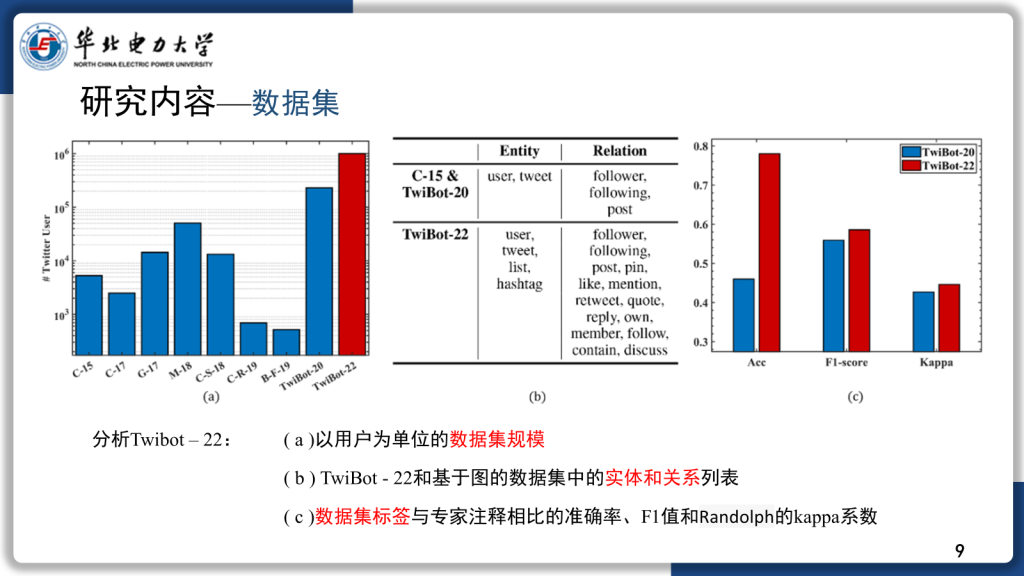
科研问题:与真实的Twitter世界相比,现有的Twitter机器人检测数据集存在规模有限,图结构不完整和标注质量差的问题。并且,随着机器人的不断进化,它以一种或多种方式操纵其信息,在时间点上表现出不一致性,给检测带来更多挑战。
科研内容如下:
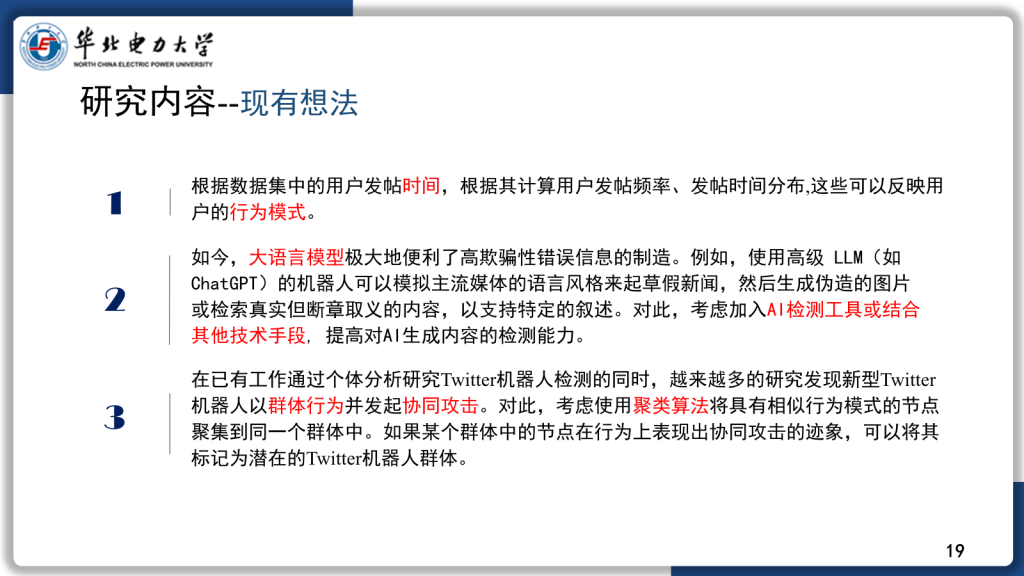
现有想法: